영상처리 알고리즘 병렬화 - [OpenCV][C++]영상에 Salt and Pepper Noise 추가
Previous Post
영상처리 알고리즘 병렬화 - [OpenCV][C++]영상 읽기/출력/저장
영상처리 알고리즘 병렬화 - [OpenCV][C++]영상 읽기/출력/저장
OpenCV(Open Source Computer Vision Library) : 실시간 컴퓨터 비전을 목적으로 한 라이브러리 https://opencv.org Home OpenCV provides a real-time optimized Computer Vision library, tools, and hardware. It also supports model execution for Ma
soobin0821.tistory.com
Goal
- 원본 영상에 Salt and Pepper 노이즈 추가
- 노이즈 추가된 영상을 출력 및 저장
Content
Salt and Pepper Noise
: 검은색(픽셀값 0) 또는 흰색(픽셀값 255) 점의 형태로 발생하는 잡음
Salt and Pepper Noise 구현 함수
- void addNoise(Mat &image, int noise_num)
- image : 노이즈를 추가할 Mat 형태의 변수
- noise_num : 픽셀값을 변경할 픽셀의 개수
1. 노이즈를 추가할 프레임의 픽셀을 임의로 선택한다.
int col_pixel = rand() % image.cols;
int row_pixel = rand() % image.rows;
2. 임의 픽셀의 픽셀값을 검정색(0) 혹은 흰색(255)으로 교체한다.
int ch_num = image.channels();
int noise_color = (rand() % 2) * 255;
if(ch_num == 1)
{
image.at<uchar>(row_pixel, col_pixel) = noise_color;
}
else if(ch_num == 3)
{
image.at<Vec3b>(row_pixel, col_pixel)[0] = noise_color;
image.at<Vec3b>(row_pixel, col_pixel)[1] = noise_color;
image.at<Vec3b>(row_pixel, col_pixel)[2] = noise_color;
}- ch_num == 1 : 흑백 영상일 경우
- ch_num == 3 : 컬러 영상일 경우
⇒ B, G, R 채널을 동일한 값(0 or 255)으로 교체한다.
Code
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
void addNoise(Mat &image, int noise_num);
int main(void)
{
VideoCapture open_origin_video("vtest.avi");
if(!open_origin_video.isOpened())
{
cerr << "ERROR! Unable to open the Origin Video\n";
open_origin_video.release();
return -1;
}
double fps = open_origin_video.get(CAP_PROP_FPS);
int width = open_origin_video.get(CAP_PROP_FRAME_WIDTH);
int height = open_origin_video.get(CAP_PROP_FRAME_HEIGHT);
int fourcc = VideoWriter::fourcc('m', 'p', '4', 'v');
VideoWriter save_origin_video("save_origin_video.mov", fourcc, fps, Size(width, height));
VideoWriter save_noise_video("save_noise_video.mov", fourcc, fps, Size(width, height));
while(open_origin_video.isOpened())
{
Mat origin_frame;
open_origin_video >> origin_frame;
if(origin_frame.empty())
{
cerr << "ERROR! blank Origin Frame grabbed\n";
return 0;
}
// 원본 영상 출력, 저장
imshow("Origin Video", origin_frame);
save_origin_video << origin_frame;
Mat noise_frame;
noise_frame = origin_frame.clone();
addNoise(noise_frame, 5000); // 노이즈 추가
// 노이즈가 적용된 영상 출력, 저장
imshow("Noise Video", noise_frame);
save_noise_video << noise_frame;
if(waitKey(1000 / fps) == 'q')
{
break;
}
}
open_origin_video.release();
save_origin_video.release();
save_noise_video.release();
destroyAllWindows();
return 0;
}
void addNoise(Mat &image, int noise_num)
{
srand((unsigned int)time(NULL));
for(int k = 0; k < noise_num; k++)
{
int col_pixel = rand() % image.cols; // noise를 추가할 열을 임의로 선택
int row_pixel = rand() % image.rows; // noise를 추가할 행을 임의로 선택
int ch_num = image.channels();
int noise_color = (rand() % 2) * 255; // 0 or 255
if(ch_num == 1) // 흑백 영상
{
image.at<uchar>(row_pixel, col_pixel) = noise_color; // 임의 픽셀의 픽셀값을 검정색(0) 혹은 흰색(255)으로 교체
}
else if(ch_num == 3) // 컬러 영상
{
image.at<Vec3b>(row_pixel, col_pixel)[0] = noise_color; // B 채널
image.at<Vec3b>(row_pixel, col_pixel)[1] = noise_color; // G 채널
image.at<Vec3b>(row_pixel, col_pixel)[2] = noise_color; // R 채널
}
}
}
Result
- 원본 영상에 Salt and Pepper Noise가 추가된 새로운 영상이 화면에 출력되는 동안 새로운 영상 파일이 생성된다.
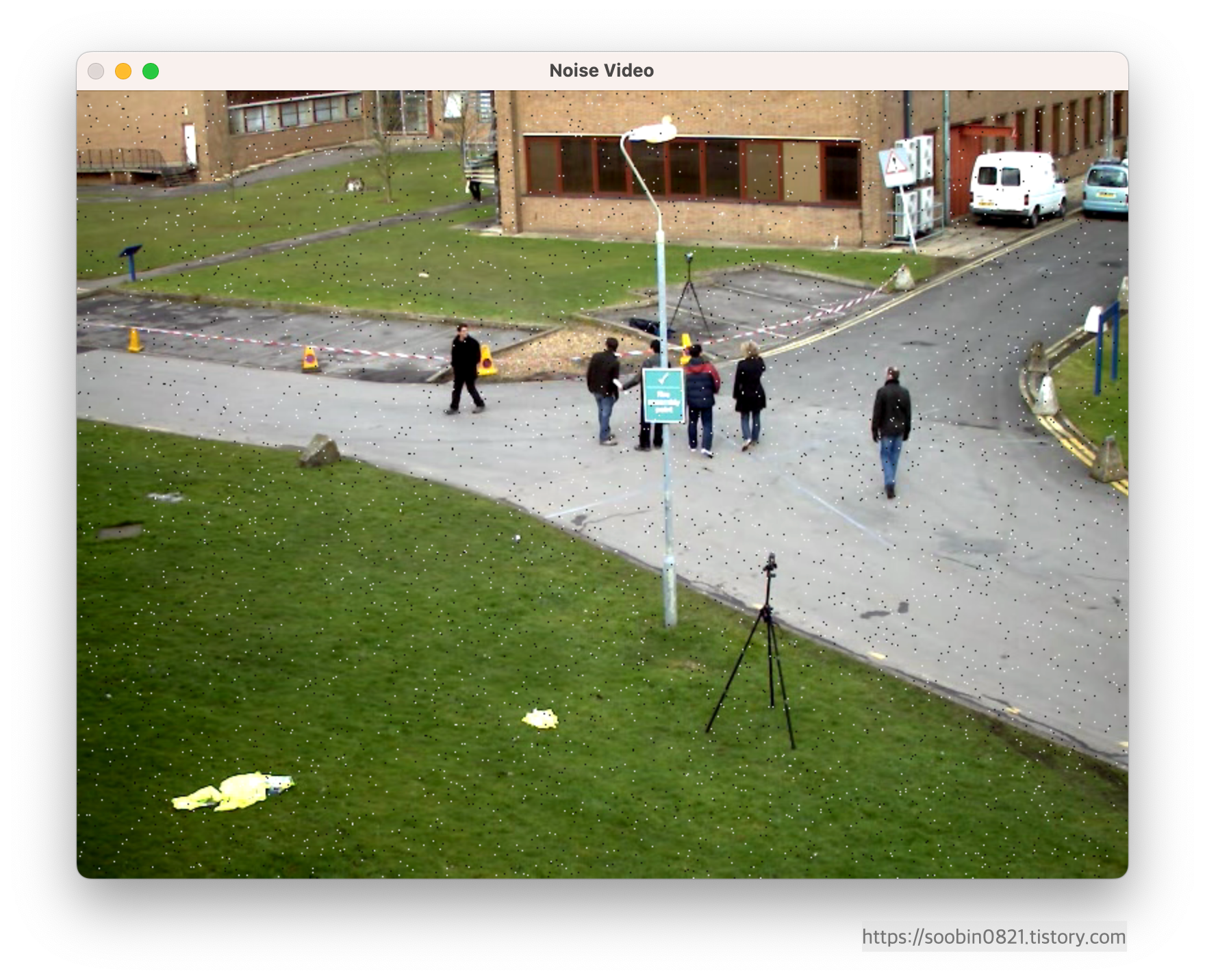
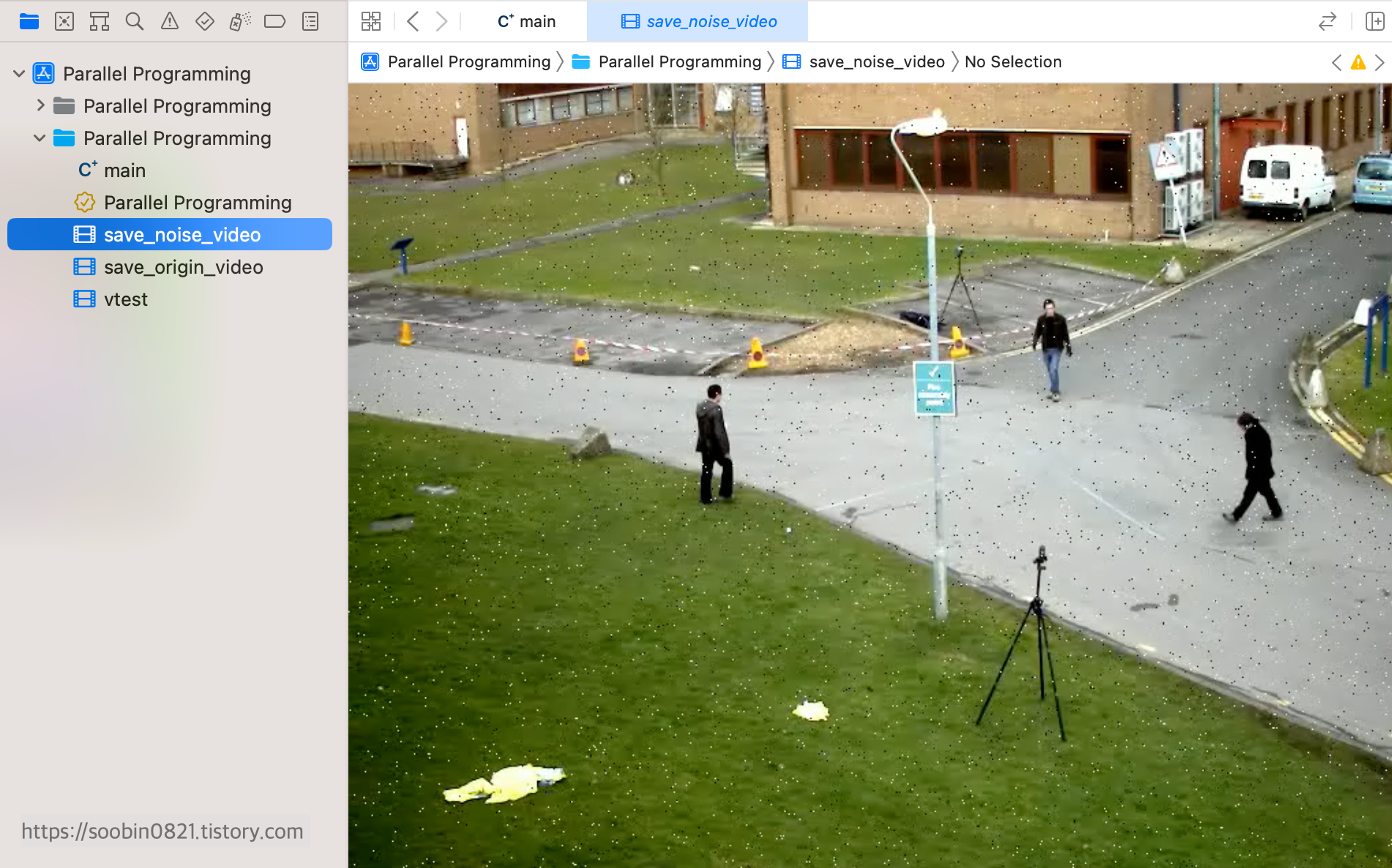
- 영상이 종료될 경우, 생성했던 윈도우가 전부 제거된다.
GitHub
https://github.com/YunSoobin/ParallelProgramming
GitHub - YunSoobin/ParallelProgramming: 영상처리 알고리즘 병렬화
영상처리 알고리즘 병렬화. Contribute to YunSoobin/ParallelProgramming development by creating an account on GitHub.
github.com